Our Geomatics Research Unit works with a variety of techniques that integrate sensors able to capture data and images with methods for the treatment, analysis, interpretation, and diffusion of geographic information. The key characteristic of geographic information is the geo-location, i.e. the attribution of spatial coordinates, e.g. cartographic, geographic, etc.
Geomatics connects various traditional disciplines, like geodesy, photogrammetry or cartography, with more recently developed fields like remote sensing, satellite navigation and geographic information systems.
Inside the Geomatics Research Unit
Our Geomatics Research Unit includes two main Research Groups:
- Geodesy and Navigation Group: This group is focused on positioning and navigation, doing research in the integration of any available sensor for local geodetic applications. Our Group has developed theoretical, software development, and hardware integration capabilities through the realization of several applied research projects. The Group deals with acquisition, normalization, automatic classification, visualization of georeferenced data and its usability for several applications. This includes precise positioning and navigation with INS/GPS or INS/Galileo, LiDAR and imaging sensor orientation and calibration, kinematic INS/GPS gravimetry, etc.
- Remote Sensing Group: The group is focused on a variety of remote sensing techniques to perform Earth observation through images and data collected by different types of sensors. Our Group has the objective to carry out research related to the generation and analysis of spaceborne, airborne and ground-based data, and to develop scientific and technical applications. Our activities are mainly related to active sensor types, in particular Synthetic Aperture Radar (SAR) imagery. Nevertheless, we have also experience with passive sensors.
Research lines
Our Active Remote Sensing research line is the most consolidated of the Research Unit. It encompasses algorithm development and generation of software tools for data analysis; hardware development and integration, taking full advantage of the technical expertise available at CTTC; and application development. It includes two main research fields:
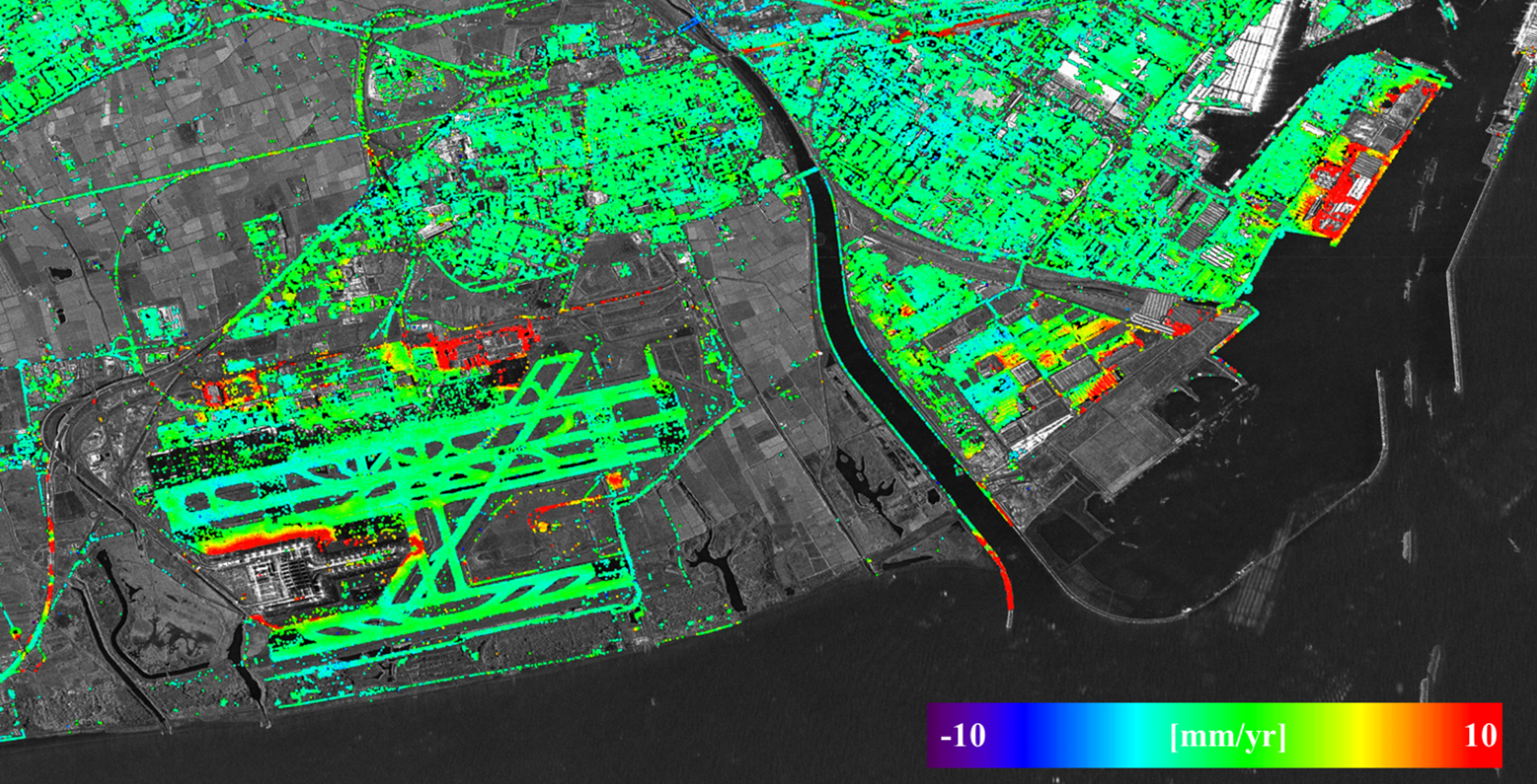
- Satellite-based active remote sensing, which includes Persistent Scatterer Interferometry for deformation measurement and monitoring; Interferometric SAR (InSAR) for Digital Elevation Model (DEM) generation; and SAR polarimetry.
- Short-range active remote sensing. This is based on terrestrial (ground-based) remote sensing techniques that are highly complementary to the satellite-based techniques. It includes Ground-based SAR for deformation measurement and monitoring; Real-Aperture-Radar (RAR) for vibration measurement and characterization; Terrestrial Laser Scanning; and Drone-based SAR.
This line complements the active remote sensing research line. It includes two main research sub-lines associated to passive remote sensing and photogrammetry.
- Information extraction and thematic mapping. This concerns the extraction of information from a variety of multi-platform (terrestrial, airborne, RPAS or spaceborne) passive sensors and the generation of value-added maps from the pre-processed data. The activities involved are the development of software tools for the automatic or semi-automatic extraction of information from multi-sensor imagery and point clouds. Examples of applications include: accessibility maps; building extraction; object detection and tracking from aerial imagery; etc.
- Sensor calibration and positioning. Any type of primary data acquisition requires the geometric calibration of the sensor used for data capture, and the determination of its 3D position and orientation. This research sub-line involves the development of algorithms for calibration, orientation and positioning of multiple sensors.
This research aims to be a step forward in improving methods and procedures for indoor navigation and mapping. Currently, the generation of this information is a technological trending topic. We have low quality solutions (meter level accuracy) at very reasonable cost (few hundred euros). But good performance positioning and mapping in interiors is still expensive (tens of thousands of euros) and requires very long acquisition campaigns.
We are working in new low-cost modular, multi-sensor acquisition and processing platforms. The platforms use the newest Commercial-of-the-Shelf sensors and process data under geodetic criteria (redundancy, heterogeneity and rigour).

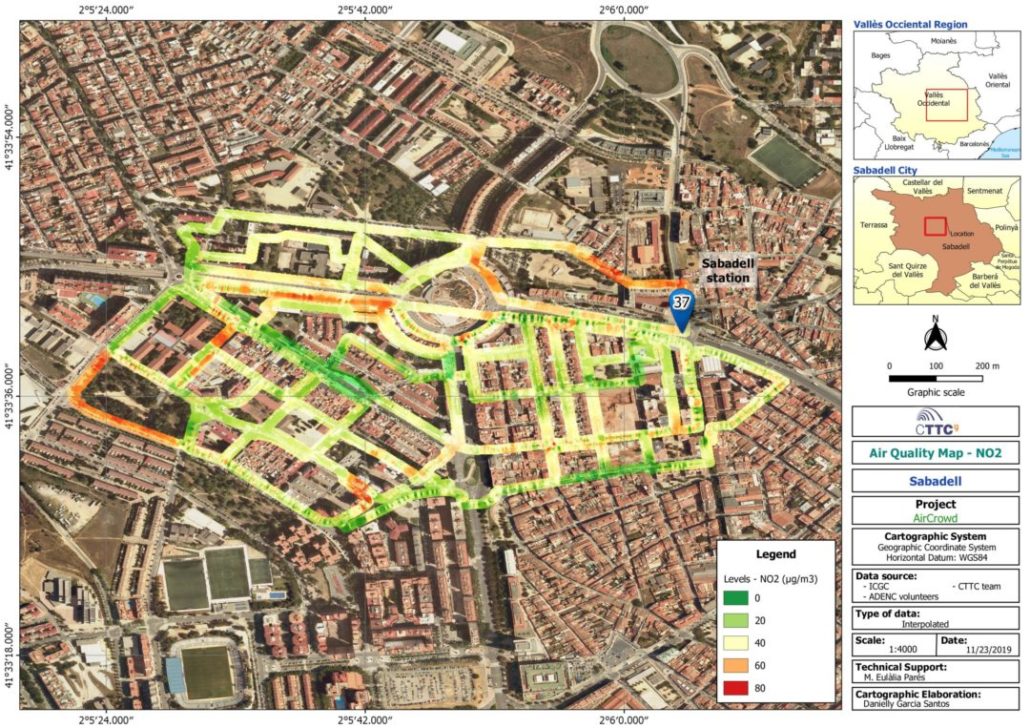
Geomatics has always been characterized by being a transversal discipline and with high adoption of latest techniques if useful. In our group, we are exploring the feasibility and the potential uses that latest mathematical and technological developments can bring to our field. To mention some of them: Machine Learning (ML) and Artificial Intelligence techniques, citizen-science and edge computing. We have successfully used ML for image segmentation and classification. We have also developed interesting experiments with low-cost distributed sensors to perform environmental monitoring. And we will soon be able to test our algorithms in a distributed network.
Our main goal with this research line is to identify and focus on those techniques that can directly benefit all the research lines of the RU.